
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.
Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет "воспринимать" среднее значение подводимой к нему энергии.
Существует много схем для генерации ШИМ сигнала. Одна из самых простых - это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
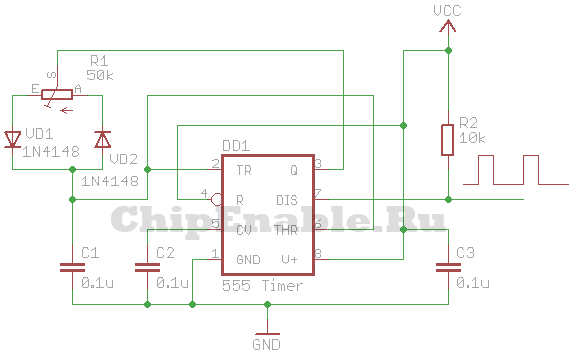
Напряжение питания схемы VCC может быть в диапазоне 5 - 16 Вольт. В качестве диодов VD1 - VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.

Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
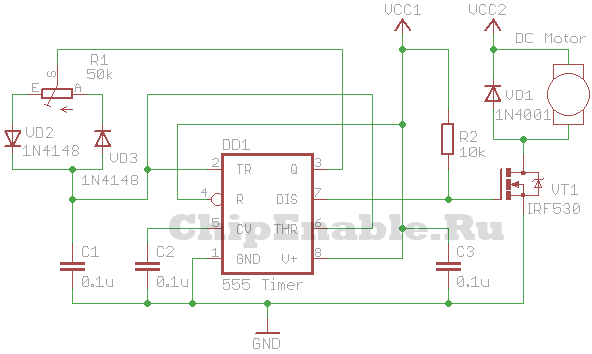
VT1 - полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
Двигатель постоянного тока способствует превращению энергии постоянного тока в работу механического типа.
На сегодняшний день практичное управление осуществляется не только в соответствии с традиционными схемами, но также согласно достаточно оригинальным или малоизвестным схемотехническим решениям.
Самым простым способом регулировки скорости двигательного вращения является применение модуляции (РWМ) широтно-импульсного типа, или ШИМ.
Данный способ базируется на подаче питающего напряжения на движок в форме импульсов со стабильной частотой следования, но изменением длительности.
Вся ШИМ-сигнальная система имеет очень важный критерий, представленный коэффициентом стандартного заполнения (Duty сyсlе).
Такая величина соответствуют соотношению импульсной длительности к его периоду:
D = (t/Т) × 100 %
Для самой простой схемы реализации управления ДПТ характерно наличие полевой транзисторной части с подачей на затвор ШИМ-сигнальной системы. В подобной схеме транзистор представляет особый электронный ключ, которым один из двигательных выводов коммутируется на землю. В этом случае открытие полупроводникового триода осуществляется именно на момент импульсной длительности.

Конструкция двигателя постоянного тока
При низкой частоте и в условиях незначительного коэффициента ШИМ-сигнала преобразующее устройство срабатывает рывками. Высокая частота РWМ, составляющая несколько сотен Герц, способствует непрерывному вращению мотора, а скорость вращательного движения в этом случае изменяется строго пропорционально коэффициенту заполняемости.
Известно множество схематичных решений, генерирующих ШИМ-сигнал, но к числу наиболее простых относится «схема таймера 555», нуждающаяся в минимальном количестве компонентов и не требующая особой настройки.
Использование биполярного транзистора в качестве надежного переключателя - один из способов управления двигателем. Выбор пассивного элемента электрической цепи, или R, предполагает протекание тока, не превышающего показатели максимальных токовых величин в микроконтроллере.
Полупроводниковый триод должен иметь соответствующий коллекторный ток и оптимальные максимальные значения, а также выделяемую мощность:
P = Uкэ × Iк.
Одной из проблем, возникающих в процессе использования биполярных полупроводниковых триодов, является избыточный базовый ток.

Схема управления
Как правило, токовое соотношение на выходном сигнале и входном транзисторе составляет 100 hfe. Функционирование элемента в условиях насыщения вызывает сильное снижение коэффициента.
Оптимальным вариантом является транзисторное комбинирование, или высокоэффективный транзистор Дарлингтона, который характеризуется высокими показателями токового усиления и незначительной скоростью работы.
При выборе индуктивной нагрузки, представленной двигателем, решение проблемы режима плавного управления мощностными показателями мотора не всегда дается легко, что зависит от нескольких факторов, представленных:

Управление двигателями постоянного тока
Оптимальным вариантом для решения практически всех перечисленных выше проблем является использование частотных инверторов.
Индуктивный тип схемы для управления двигателем ПТ не отличается особой сложностью по сравнению с частотным управлением, а также способен обеспечивать вполне приемлемую результативность.
 Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Наиболее важные проблемы управления представлены:
Важно помнить, что данная схемотехника отличается незначительной сложностью, при которой инициализация микроконтроллера требует достаточного количества времени, что обусловлено конкретно решаемыми задачами при нахождении выходных сигналов в третьем состоянии.
![]()
Классическая схема включения MOSFET в ключевом режиме
Такой тип канала, как правило, подсоединяется таким образом, чтобы на сток приходились наиболее отрицательные показатели напряжения по сравнению с истоком.
MOSFET-транзисторы высокой степени мощности достаточно популярны, что обусловлено исключительно высокой переключательной скоростью в условиях низкого уровня мощности управления, прикладываемой к затвору.
Процесс управления достаточно мощным двигателем ПТ осуществляется посредством реле-модуля спаренного типа. Процесс подключения мотора к реле предполагает обязательный учет наличия трех выходных отверстий:

Управление направлением вращения двигателя постоянного тока
Контактная группа устройства, преобразующего любой вид энергии в работу механического типа, подсоединяется к общим релейным контактам (СОМ). «Плюс» элемента питания подключается к контактам нормально-разомкнутого реле (NО), а «минус» фиксируется на контактной группе реле нормально-замкнутого типа (NС).
Реализация полного мостоуправления двигателя осуществляется при включении и выключении реле соответствующим образом.
Управление двигателем посредством H-моста с управляющими логическими сигналами на входах и вращением в две стороны осуществляется несколькими вариантами Н-мостов:

Транзисторный Н-мост
Самым простым вариантом станет сборка Н-моста на МОSFЕT-транзисторах. Именно этот способ сочетает в себе легкость выполнения и достаточные показатели мощности, но не предполагает одновременную подачу на две единицы.
Известно множество вариантов микросхем, используемых для управления двигателем, включая ТLЕ4205 и L298D, а также стандартные электромагнитные реле, но перечисленные выше способы относятся к категории самых доступных.
Для управления двигателем шагового типа необходима подача постоянного напряжения на обмоточную часть с соблюдением максимально точной последовательности, благодаря чему обеспечивается точность угла осевого поворота.
Шаговые двигатели, имеющие постоянные магниты, чаще всего применяются в бытовых приборах, но могут встречаться в устройствах промышленного типа. Доступные по стоимости двигатели обладают низким крутящим моментом и низкой скоростью вращения, благодаря чему прекрасно подходят для компьютеров.

Управление шаговым двигателем
Изготовление двигателей шагового типа на основе постоянных магнитов не отличается сложностью и экономически целесообразно только при больших объемах производства, а ограниченность использования обусловлена относительной инертностью и неприемлемостью применения в условиях точного временного позиционирования.
Шагового типа двигатели, имеющие магнитное сопротивление в условиях отсутствия стабильного магнита, характеризуются свободным роторным вращением без крутящего вращения остаточного типа. Такие двигатели, как правило, устанавливаются в компактных агрегатах, включая системы микро-позиционирования. Основные достоинства такой схемы представлены чувствительностью к токовой полярности.
Вариант характеризуется очень удачным сочетанием принципа работы моторов с переменными и постоянными магнитами.
Значительное количество двигателей гибридного типа отличается классическим двухфазным строением.
Необходимость выполнять изменение полярности напряжения может возникать в процессе управления двигателем или при использовании схемы мостового преобразователя напряжения. В этом случае ключи чаще всего представлены реле, полевыми и биполярными транзисторами, а также H-мостами, встраиваемыми в микросхему.
Коллекторные двигатели постоянного тока получили широкое распространение за счет своей дешевизны и высокого КПД. Чаще всего такие двигатели используются в старт/стоп режиме и не требуют для своего подключения никакой пускорегулирующей аппаратуры, кроме обыкновенного выключателя. Однако, часто требуется регулировка скорость вращения, момент на валу или положение механизма, приводимого в движение двигателем. В таких случаях применяют микропроцессорные блоки управления коллекторными двигателями постоянного тока. Простейшим регулятором оборотов двигателя является источник питания с изменяемым выходным напряжением или ШИМ регулятор (именно его продают на Aliexpress). Это простые и недорогие решения, но такой регулятор не имеет обратной связи - обороты двигателя с таким регулятором зависят от нагрузки на валу. Для решения этой проблемы в регуляторы вводят обратную связь по скорости вращения. Простейшим вариантом получения информации о скорости вращения двигателя является установка на его валу тахогенератора или импульсного датчика. Такие решения позволяют решить проблему стабилизации скорости вращения двигателя, но усложняет конструкцию изделия и увеличивает его стоимость. Современные микропроцессорные технологии позволяют использовать в качестве тахогенератора сам электродвигатель (почти все электрические машины обратимы), измеряя ЭДС, генерируемую двигателем в момент кратковременного отключения от него питающего напряжения. Такое решение представляется оптимальным по соотношению цена/качество.
Вторым важным параметром регулирования коллекторных двигателей является момент на валу двигателя. В большинстве случаев ограничение момента требуется для исключения повреждения самого двигателя или механизма. Часто необходим режим стабилизации именно выходного момента двигателя, например, для управления электроприводом скутера или для регулировки силы натяжения у станка для перетяжки теннисных ракеток. В качестве сигнала выходного момента чаще всего используется мгновенное значение тока якоря двигателя.
И третий параметр управления –положение или координата механизма, приводимого в действие двигателем постоянного тока. Управление скоростью, моментом и положением позволяет создавать полноценные сервоприводы на основе коллекторных двигателей. Сигнал обратной связи по положению может быть получен от аналогового потенциометрического датчика или энкодера на валу двигателя. Для задания требуемого положения может использоваться аналоговый сигнал, цифровой интерфейс или входы step/dir как в блоках управления шаговыми двигателями.
Управление двигателем постоянного тока в САУ подразумевает либо изменение скорости вращения пропорционально некоторому сигналу управления, либо поддержание этой скорости неизменной при воздействии внешних дестабилизирующих факторов.
Используются 4 основные метода управления, реализующие перечисление выше принципы:
реостатно-контакторное управление;
управление по системе «генератор-двигатель» (Г-Д);
управление по системе «управляемый выпрямитель –Д» (УВ-Д);
импульсное управление.
Подробное исследование этих способов – предмет ТАУ и курса «Основы электропривода». Мы рассмотрим только основные положения, имеющие непосредственное отношение к электромеханике.
Обычно используются 3 схемы:
при регулировке скорости n от 0 до nном в цепь якоря включают реостат (якорное управление);
при необходимости получить n > nном реостат включают в цепь ОВ (полюсное управление);
для регулирования скорости n < nном и n > nном реостаты включают как в цепь якоря, так и в цепь ОВ.
Перечисленные схемы применяются при ручном управлении. Для автоматического управления используют ступенчатое переключение R ра и R рв с помощью контакторов (реле, электронных коммутаторов).

Если требуется точное и плавное регулирование скорости, число коммутируемых резисторов и элементов коммутации должно быть большим, из-за чего увеличиваются габариты системы, стоимость и снижается надежность.
Регулирование частоты вращения от 0 до по схеме рис. производится регулировкой R в (U гизменяется от 0 до n ном). Для получения скорости двигателя больше nном - изменением R вд (уменьшение тока ОВ двигателя уменьшает его основной поток Ф, что и приводит к увеличению скорости n).
Переключатель S1 предназначен для реверса двигателя (изменения направления вращения его ротора).
Поскольку управление Д осуществляется путем регулирования сравнительно малых токов возбуждения Г и Д, оно легко адаптируется к задачам САУ.

Недостаток такой схемы – большие габариты системы, масса, низкий КПД, поскольку здесь имеется трехкратное преобразование преобразование энергии (электрической в механическую и обратно, и на каждом этапе имеются потери энергии).
Управление по системе «управляемый выпрямитель – двигатель»
Система «управляемый выпрямитель – двигатель» (см. рисунок) похожа на предыдущую, но вместо электромашинного источника регулируемого напряжения, состоящего из, например, трехфазного, двигателя переменного тока и Г=Т, используется управляемый, например, тоже трехфазный тиристорный электронный выпрямитель.

Сигналы управления формируются отдельным блоком управления и обеспечивают требуемый угол открывания тиристоров, пропорциональный сигналу управления Uу.
Достоинства такой системы - высокий КПД, малые габариты и масса.
Недостатком по сравнению с предыдущей схемой (Г-Д) является ухудшение условий коммутации Д из-за пульсаций его тока якоря, особенно при питании от однофазной сети.

На двигатель с помощью импульсного прерывателя подаются импульсы напряжения, модулированные (ШИМ, ВИМ) в соответствии с управляющим напряжением.
Таким образом, изменение скорости вращения якоря достигается не за счет изменения напряжения управления, а путем изменения времени, в течение которого к двигателю подводится номинальное напряжение. Очевидно, что работа двигателя состоит из чередующихся периодов разгона и торможения (см. рисунок).

Если эти периоды малы по сравнению с полным временем разгона и остановки якоря, то скорость n не успевает к концу каждого периода достигать установившихся значений nном при разгоне или n = 0 при торможении, и устанавливается некоторая средняя скорость nср, величина которой определяется относительной продолжительностью включения.
Поэтому в САУ требуется схема управления, назначение которой – преобразование постоянного или изменяющегося сигнала управления в последовательность управляющих импульсов с относительной продолжительностью включения, являющейся заданной функцией величины этого сигнала. В качестве элементов коммутации используются силовые полупроводниковые приборы – .
: Важнейший станок "деревянного" моделиста .
Прежде всего - для чего это нужно. Почти у каждого моделиста имеется самодельный или промышленный электроинструмент с приводом от коллекторного двигателя постоянного тока. При этом обычно такой инструмент не имеет регулятора оборотов или имеется простейшая ступенчатая регулировка. Не буду лишний раз доказывать, что наличие регулятора оборотов в электроинструменте позволяет оптимально подобрать режим для каждой операции, особенно при использовании различных насадок. Кроме того, моделисты часто используют низковольтные нагреватели - паяльники, приспособления для гибки деревянных реек и т. п. При этом с помощью регулятора можно получить оптимальную температуру нагревателя. Моделисту иногда приходится наносить гальванические покрытия, для чего необходим регулируемый источник постоянного тока. Все эти функции способно выполнить устройство, описанное ниже.
При конструировании бормашины встал вопрос о выборе схемы регулятора оборотов. Реостатные схемы регулирования скорости вращения коллекторных двигателей постоянного тока, в том числе с применением силовых транзисторов, на которых падает часть напряжения, обладают низким КПД при малых и средних оборотах. На балластных транзисторных ключах рассеивается значительная тепловая мощность, что ужесточает требования к системе их охлаждения. Поэтому выбор системы регулирования скорости вращения пал на импульсные схемы с изменением ширины прямоугольных импульсов напряжения, подаваемых на обмотку двигателя (широтно-импульсная модуляция - ШИМ). Принцип ШИМ заключается в следующем: напряжение в нагрузку подается импульсами постоянной амплитуды, причем соотношение между шириной импульса и паузы (скважность) регулируется, что эквивалентно изменению напряжения питания на нагрузке. Достоинством этой схемы является ее высокая экономичность и надежность. Управляющий нагрузкой транзистор бывает только либо полностью включен, либо выключен, поэтому он практически не нагревается и его можно устанавливать без теплоотвода.
После анализа различных регуляторов качестве базовой была выбрана схема, опубликованная в журнале (№4/2001., перепечатка из "Hobby Elektronika" №7/01, автор Иштван Кекеш). Регулятор (см.схему) содержит задающий генератор напряжения треугольной формы частотой 2кГц (DA1.1, DA1.4), электронный ключ VT1 и регулятор скважности (DA1.2, DA1.3, R8). На рисунке ниже показаны графики напряжений в типовых точках схемы.
Здесь синим цветом показано напряжение на выходе генератора треугольного напряжения (вывод 1 DA1), красным - напряжение регулировки оборотов с потенциометра R8, зеленым - напряжение на двигателе. Очень наглядно видно, что включение и выключение напряжения на нагрузке происходит в момент совпадения напряжения задающего генератора и напряжения на регулирующем потенциометре. Чем выше управляющее напряжение, тем шире импульс на нагрузке.
В схеме предусмотрена возможность включения двигателя с помощью ножной педали SA2. В моем варианте в качестве педали работает обыкновенный короткоходовый концевой выключатель с нормально замкнутыми контактами (в народе -), лежащий на полу. При выключенном SA1 двигатель работает постоянно, при включенном - только при нажатии на педаль. Благодаря наличию конденсатора C2 пуск двигателя осуществляется плавно, что иногда может быть полезно (при указанной емкости C2 примерно за 1 сек.). Переключатель SA4 служит для реверсирования двигателя. Диод D3 стабилизирует питание регулятора. Питание осуществляется через понижающий трансформатор TV1 и выпрямитель D4. Параметры трансформатора зависят от примененного электродвигателя. В первом приближении напряжение вторичной обмотки трансформатора должно быть равно номинальному напряжению электродвигателя плюс 5 вольт, падающих на выпрямителе и ключевом транзисторе. Для возможности работы в форсированном режиме можно добавить еще процентов 20-30. Расчетный ток вторичной обмотки трансформатора, диодов выпрямителя и ключевого транзистора должны быть больше, чем ток, потребляемый электродвигателем, причем для надежности работы лучше дать запас в 3-5 раз. При напряжении питания менее 20В диод D3 можно исключить. Напряжения, указанные на схеме, соответствуют двигателю 27В 30 Вт.
Большинство элементов схемы смонтировано на печатной плате размером 65Х40 мм. (более тонкой линией показана перемычка) Плата установлена в корпусе на двух трубчатых стойках с винтами М2,5 (см. также схему расположения элементов и шаблон для сверления отверстий). Внутри корпуса смонтированы трансформатор, конденсатор С4, выпрямитель D4. Регулятор оборотов R8, переключатели и разъемы для подключения двигателя и педали смонтированы на лицевой панели, резисторы R13 И R14 смонтированы на R8.
В качестве DA1 можно применить любой универсальный счетверенный операционный усилитель. В оригинале были указаны TL064, TL075, TL084, я применил LM324. Ключевой транзистор применен КТ829А (100В, 8А), для более мощных двигателей можно применить КТ827А (100В, 20А). Диоды D1 и D2 защищают VT1 от выбросов напряжения на индуктивной нагрузке.
При налаживании R13 и R14 не устанавливают, провода от платы припаивают прямо к R8. При правильном монтаже и исправных деталях схема начинает работать сразу. Вращением R8 проверяют регулировку оборотов от нуля до максимума. Если последние не совпадают с крайними положениями R8, необходимо подобрать R13 и R14, чтобы максимум и минимум совпали с крайними положениями регулятора. Возможен вариант, когда схема не будет работать из-за того, что не запускается задающий генератор. В этом случае можно попробовать немного увеличить номинал R4. Для изменения времени плавного пуска можно изменять емкость C2.
В заключение хочу отметить, что потратив всего около $10 и немного свободного времени, можно значительно улучшить характеристики своего электроинструмента. Все вопросы по изготовлению и наладке данного устройства задавайте в









